
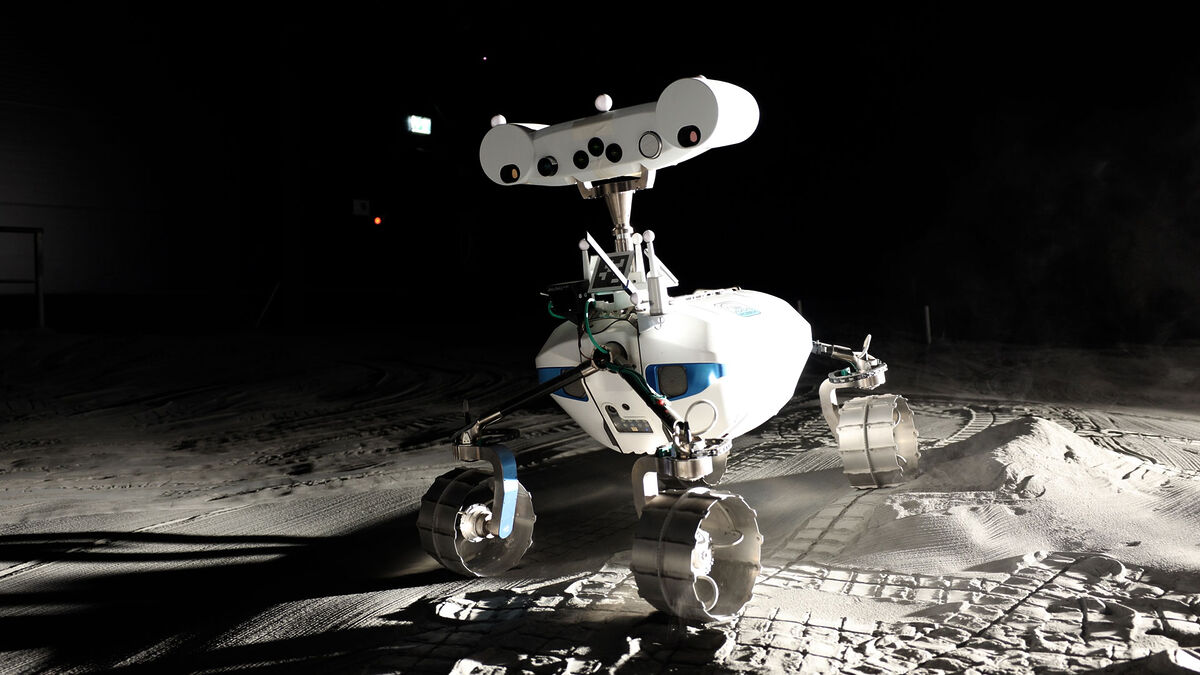
Прямо как в мультфильме от Pixar, два очаровательных робота неторопливо ползут по имитации лунной поверхности в поисках воды. Один из них, носящий имя Lightweight Rover Unit 1 (LRU1), даже внешне напоминает знаменитого ВАЛЛ-И.
Однако эта идиллическая картина — не развлечение, а серьезная симуляция, проведенная Немецким космическим агентством (DLR). Ее цель — помочь будущим астронавтам миссии «Артемида» в поисках водяного льда на Луне.
Вода — ключевой ресурс для жизни, приготовления пищи и даже производства ракетного топлива. Чем меньше воды придется везти с Земли, тем ниже будет стоимость запуска, где на счету каждый грамм. Если же роботы смогут заранее разведать месторождения H₂O, это сэкономит астронавтам драгоценное время для решения других задач.
LRU1, тот самый «ВАЛЛ-И», картографировал поверхность на Лунном аналоговом полигоне в Кёльне. Его панорамная камера позволяла «видеть» не только в видимом спектре, но и в диапазонах, недоступных человеческому глазу, что необходимо для поиска минералов и льда. Ровер тащил за собой прицеп с георадаром, чтобы заглянуть вглубь грунта. Тем временем его напарник, LRU2, внимательно следил за его работой. Получив данные, LRU2 перешел к активным действиям: его роботизированная рука с лазером провела спектроскопию, анализируя образцы пород. Поскольку вода ранее уже находилась в лунных камнях — внутри кристаллов вулканического стекла или минеральных зерен — такой лазерный анализ потенциально богатых пород может оказаться жизненно важным.
Работа в суровых лунных условиях требует мобильности, поэтому в симуляции участвовали два ровера. «Комбинация различных методов дает преимущества в изучении поверхности и того, что скрыто под ней», — пояснила Николь Шмитц, планетолог из Института космических исследований DLR. Она возглавляла кампанию «Polar Explorer», в рамках которой и проходили испытания. По ее словам, эта миссия, ставшая первой проверкой технологий от нескольких участников, показала, что «все элементы работают».
Предварительные результаты обнадеживают: роботы успешно обнаружили водяной лед, необходимый астронавтам. Теперь ученые детально изучают собранные данные, чтобы подготовиться к следующему этапу тренировок. Информация с этих испытаний будет объединена с данными, полученными в 2022 году, когда те же роверы ползли по склону вулкана Этна.
Новая лунная миссия включала в себя несколько сложных участков, таких как искусственная лавовая пещера. Поиск воды также был сопряжен с трудностями: часть запасов удалось обнаружить только с помощью заранее проложенной сети сеймических кабелей, скрытых под трехметровым слоем реголита. Искусственно созданный мини-лунотрясение вызвало вибрации, которые и выявили сигнал, свидетельствующий о наличии H₂O.
Хотя точной даты полета этой команды роботов на Луну еще нет, представители DLR надеются, что проект «Polar Explorer» будет выбран для будущей миссии посадочного модуля «Аргонавт». «Аргонавт» — это концепт посадочного модуля Европейского космического агентства (ЕКА), частью которого является DLR. В ЕКА надеются запустить первую миссию «Аргонавта» уже в 2031 году для поддержки программы «Артемида». Этот модуль сможет доставлять на Луну оборудование для навигации, энергоснабжения и телекоммуникаций, продолжая дело мифических аргонавтов, отправившихся в плавание на корабле «Арго» за золотым руном, но теперь уже в космическом океане.
Взгляд в будущее
Успех этой симуляции открывает путь к созданию полностью автономных миссий, где роботы-первопроходцы будут не просто помощниками, а главными действующими лицами в освоении Луны. Ученые уже представляют, как целые рои таких «ВАЛЛ-И» заранее подготовят инфраструктуру для астронавтов, построив карты ресурсов и проложив первые тропы на нашем celestial спутнике. Следующим шагом станет испытание роверов в условиях, еще более близких к лунным — возможно, в пустынях Земли или во время долгой полярной ночи, где они смогут отработать добычу воды в полной темноте и при экстремально низких температурах.
Поделитесь в вашей соцсети👇







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Ваш комментарий